Après des débuts difficiles, des lanceurs spatiaux décollent aujourd’hui depuis la Floride avec une régularité de métronome, et leur premier étage réutilisable revient se poser en douceur de façon totalement autonome sur des barges installées en mer. Cette incontestable réussite technologique américaine a bien sûr donné des idées à tout ce que la planète compte de puissances spatiales, et l’Europe n’est pas en reste.
L’objet de la thèse d’Etienne Bertin s’inscrit dans ce cadre. Faire revenir en douceur sur Terre un premier étage suppose le respect de contraintes de sûreté très strictes. Il faut déterminer une trajectoire qui permet d’atteindre la zone d’atterrissage avec une vélocité nulle et une verticalité parfaite, sans quoi c’est l’écrasement assuré. Il se trouve que la planification de cette trajectoire peut se faire par la résolution d’un problème de contrôle optimal, une discipline particulièrement maîtrisée à ENSTA Paris, que ce soit à l’Unité de mathématiques appliquées (UMA) ou à l’Unité d’informatique et d’ingénierie des systèmes (U2IS).
Plusieurs trajectoires permettent ce retour en toute sécurité du lanceur. Mais une seule permet de maximiser en même temps un paramètre crucial dans le cadre de vols commerciaux, celui qui minimise les coûts de carburant.
Typiquement, le profil de mission est le suivant: après avoir arraché l’ensemble du lanceur du pas de tir, le premier étage se détache de l’étage supérieur et le laisse poursuivre sa route afin de satelliser la charge utile. Il coupe ses moteurs pour se laisser tomber, puis les rallume pour revenir vers son point de départ avant de poursuivre sa trajectoire de façon balistique.
En fin de poussée, il se retourne afin de mettre ses moteurs de nouveau en direction de la Terre. A mi-parcours, il rallume les moteurs pour freiner et ne pas risquer l’explosion des réservoirs du fait d’un échauffement consécutif aux frottements avec l’atmosphère. Enfin, un dernier allumage, plus puissant, permet de dissiper l’énergie accumulée pendant la chute et de se poser en douceur.
Dans les faits, cette trajectoire idéale est rarement suivie. La première raison est qu’un des paramètres cruciaux, la poussée maximale des moteurs-fusées, est rarement nominale et constante, et peut varier dans des proportions significatives. La seconde, qui est un corollaire de la première, c’est qu’on n’est jamais vraiment sûr de l’endroit où va démarrer exactement la trajectoire de retour. On peut donc rater la zone de récupération. Au final, c’est à tout un continuum d’incertitudes que sont confrontés les planificateurs de mission, débouchant sur un ensemble de scénarios dans lesquels la fusée ne rentre pas à bon port.
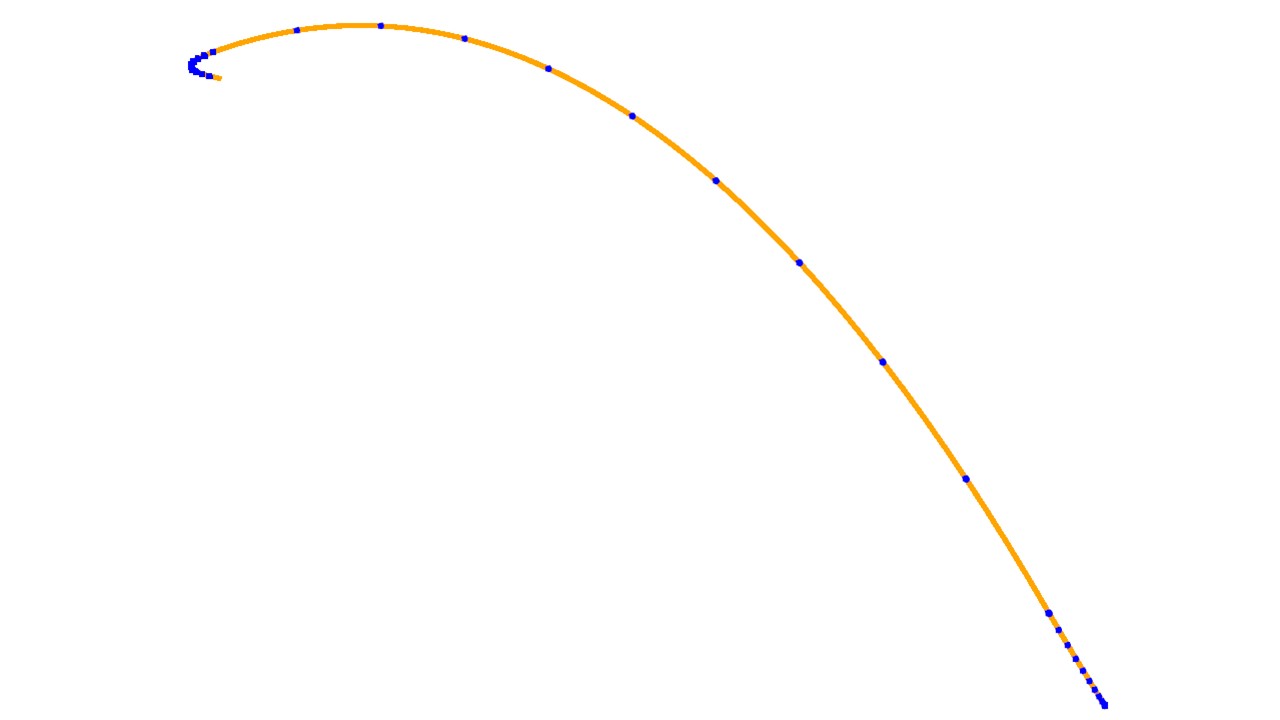
La solution étudiée par Etienne Bertin consiste à placer des bornes sur ces incertitudes fatales, de sorte qu’on puisse garantir le retour sans encombre du premier étage. Il s’agit de calculer un « tube » virtuel qui garantit d’encadrer toutes les solutions possibles de ce problème de contrôle optimal.
Pour cela, il convient d’utiliser deux outils : les méthodes ensemblistes, lesquelles permettent d’encadrer l’ensemble des trajectoires possibles d’un modèle avec incertitude dont la dynamique est connue, et le contrôle optimal, qui permet de calculer le contrôle voulu et la trajectoire qui va avec avec précision.
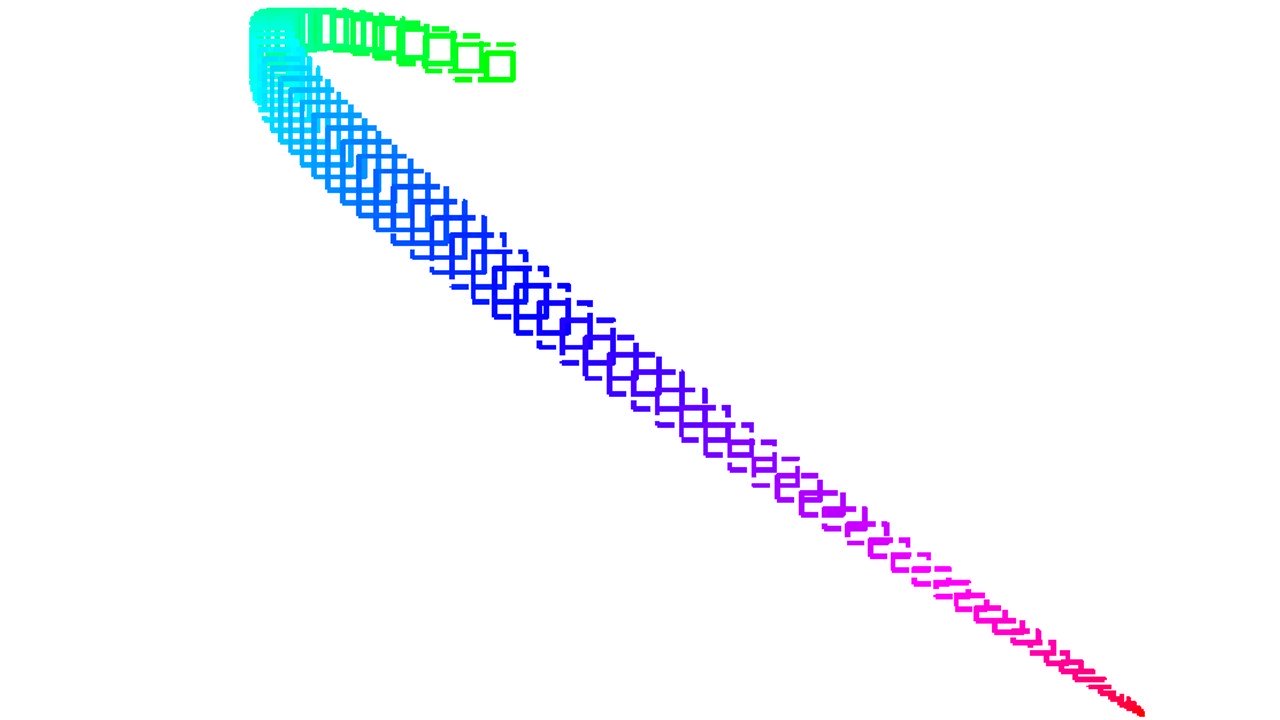
En déployant ces méthodes, Etienne Bertin a notamment démontré dans sa thèse qu’il était possible de définir des ensembles de trajectoires optimales dans les problèmes avec incertitudes bornées en proposant des méthodes d’encadrement de trajectoires utilisant des zonotopes, polygones symétriques dont la représentation machine offre de nombreuses astuces de calcul. Il a utilisé ce résultat pour développer un programme destiné à encadrer les ensembles de trajectoires optimales, et évaluer leurs performances.
Les travaux futurs permettront d’augmenter la quantité d’incertitude tolérable dans le problème en améliorant sa géométrie.
Ces travaux ont été publiés dans le journal international Acta Cybernetica, présentés à la conférence internationale CDC 2021, et communiqués dans des séminaires et workshops : SWIM2019, Journées SAGIP, International Online Seminar on Interval Methods in Control Engineering.
Cette thèse a été co-financée par l'ONERA.